山形大学大学院 理工学研究科 機械システム工学分野
水戸部研究室
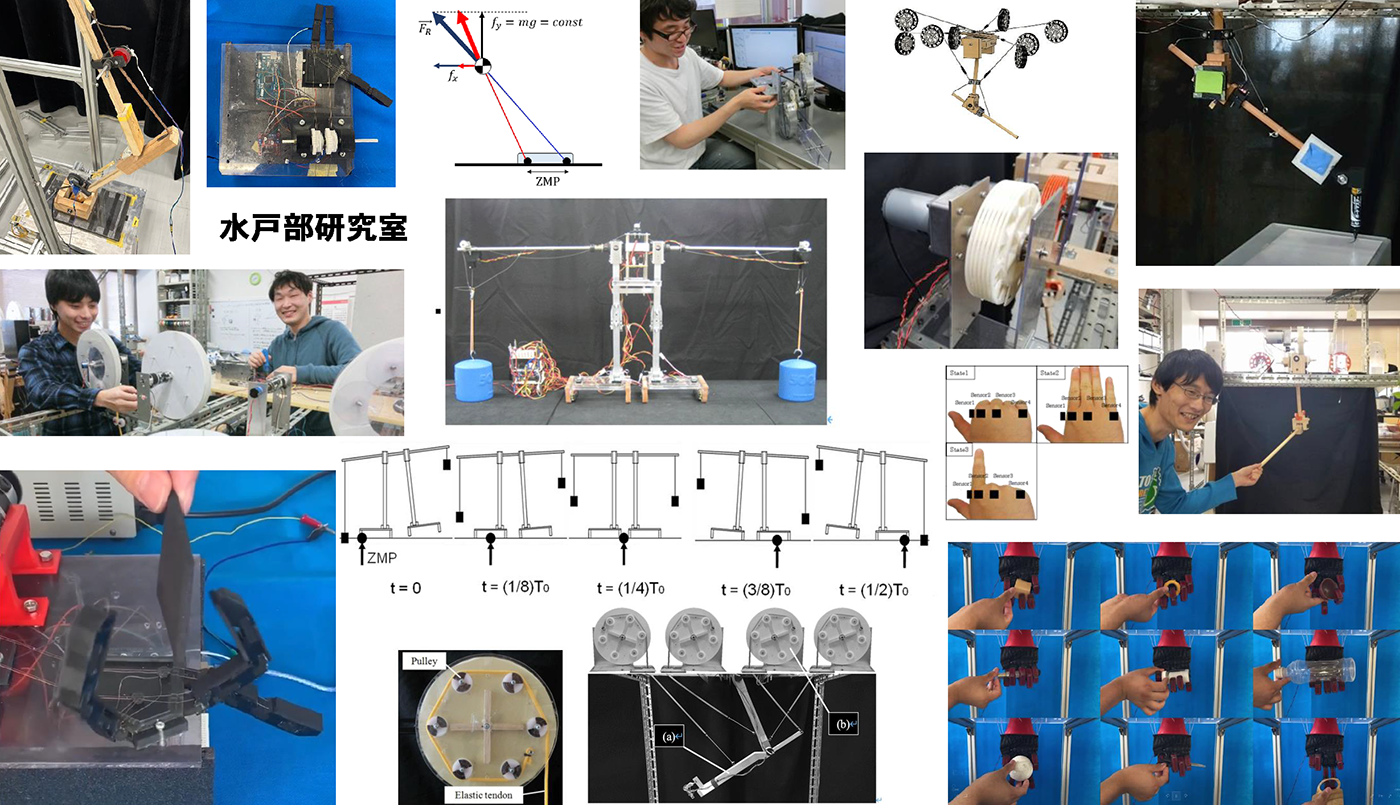
近年の卒業研究テーマ
- ワイヤ駆動ソフトロボットハンドによるつまみ動作
- 電磁ブレーキを用いた腱駆動ロボットアームの位置決め制御
- 腱張力でバランス制御する柔軟関節を持った脚ロボットの試作
- 関節が柔らかい弾性腱駆動ロボットアームによる手書き作業
近年の修士論文研究テーマ
- 柔軟関節を用いた弾性腱駆動ロボットアームによる手書き作業
- マイクロ電磁ブレーキと弾性腱で駆動する低剛性ロボットアームの位置決め制御
- 関節に転がり接触を組み込んだ腱駆動方式ソフトロボットハンドの開発
- 単モータの腱毎クラッチ駆動によるソフトハンドのジェスチャ及び把持制御
- フォトインタラプタを用いた表情インタフェースに関する研究
- 膝関節を使った急制動制御が可能な歩行ロボットの開発
- けり力印加及びZMP操作による歩行ロボットの急制動制御の開発