山形大学大学院 理工学研究科 機械システム工学分野
水戸部研究室
2リンクアーム
木材とプラスチック、ゴム紐などで構成した弾性腱駆動ロボットアームです。関節軸受を樹脂とゴムでつくりやわらかくします。リンク姿勢から直接に腱の変位を計算して、関節角度を使わない制御を試みています。作業対象がアームの運動を大部に支配する身近な作業の例として、コンセントプラグを引っこ抜く制御や、マジッペンでの線や図を描く作業を試みています。
弾性腱駆動ロボットアーム
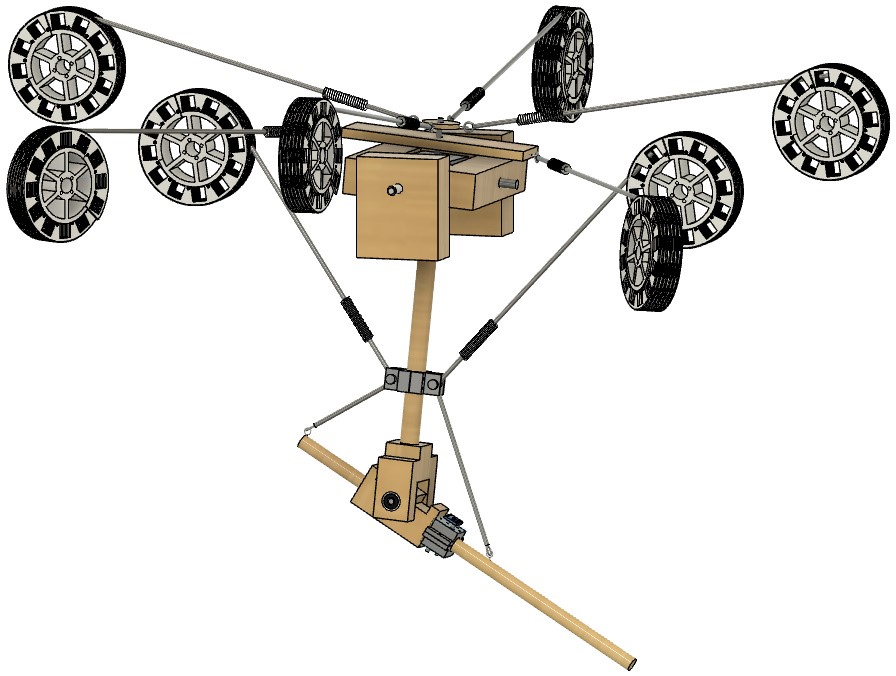
弾性腱駆動ロボットアームのモデル図です。これを使って様々な実験を行っています。 動画ではロボットアームを用いて文字を書くといった実験を行っています。
位置決め実験
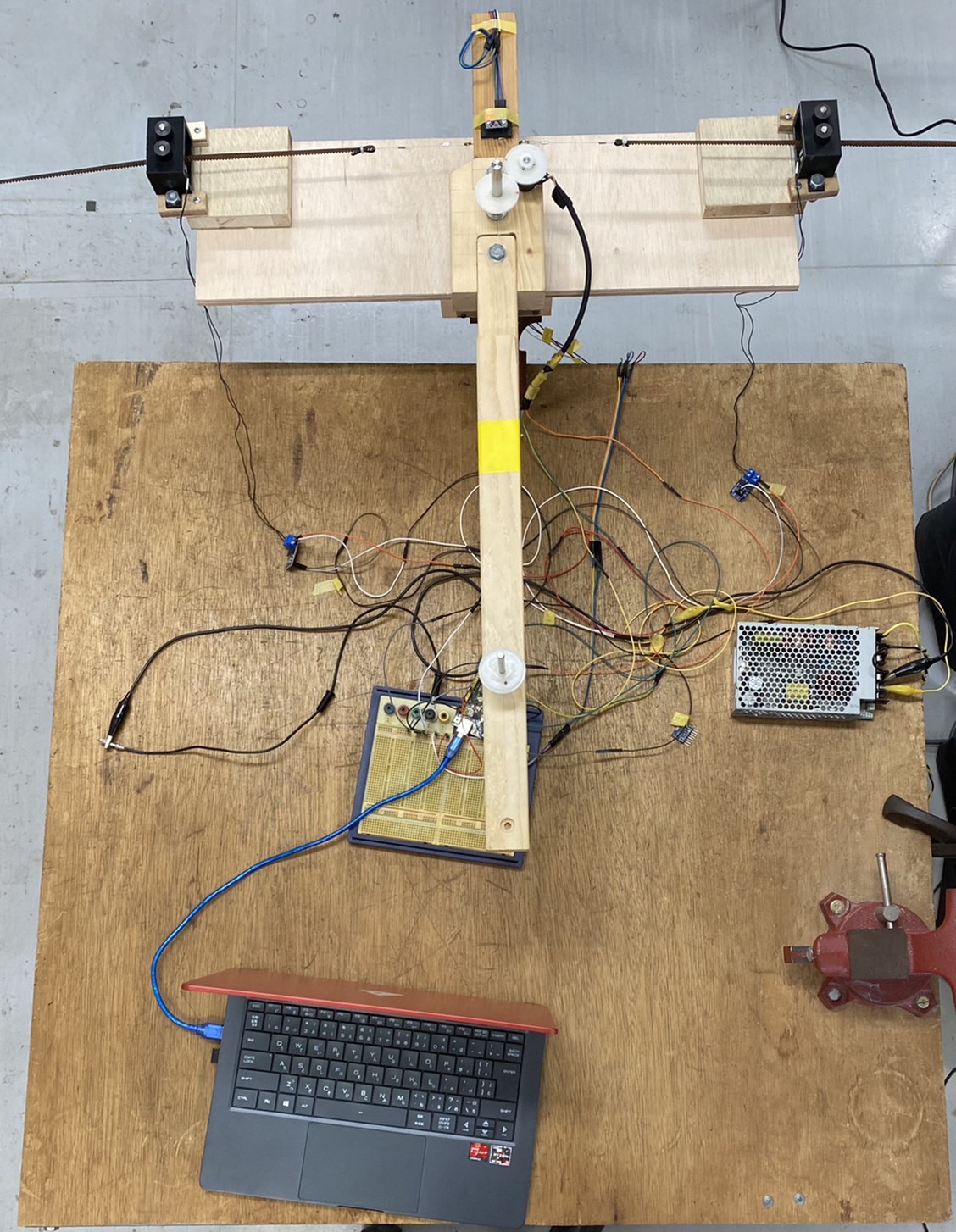
こちらはブレーキを用いた実験のための装置です。 アームを目的の位置で止めるような実験を行っています。
腱駆動実験動画
木材とプラスチック、ゴム紐などで構成した弾性腱駆動ロボットアームです。 関節軸受を樹脂とゴムでつくりやわらかくします。 リンク姿勢から直接に腱の変位を計算して、関節角度を使わない制御を試みています。 作業対象がアームの運動を大部に支配する身近な作業の例として、コンセントプラグを引っこ抜く制御や、マジックペンでの線や図を描く作業を試みています。
5指ハンド
人間のようにやわらかく、複雑な対象物形状にも適応しながら把持する動作、指を交互に組み合わせる動作ができるハンドを目指しています。 人間のこれらの動作では皮膚組織や関節構造のやわらかさが必須と思われます。私たちの班では、スポンジを用いて柔軟な指腹や関節構造を持つ腱駆動型多指ハンドを作ってみました。 駆動系と制御アルゴリムを単純化するために、マイクロ電磁クラッチの応用を試みています。
5指ソフトハンドの概要図
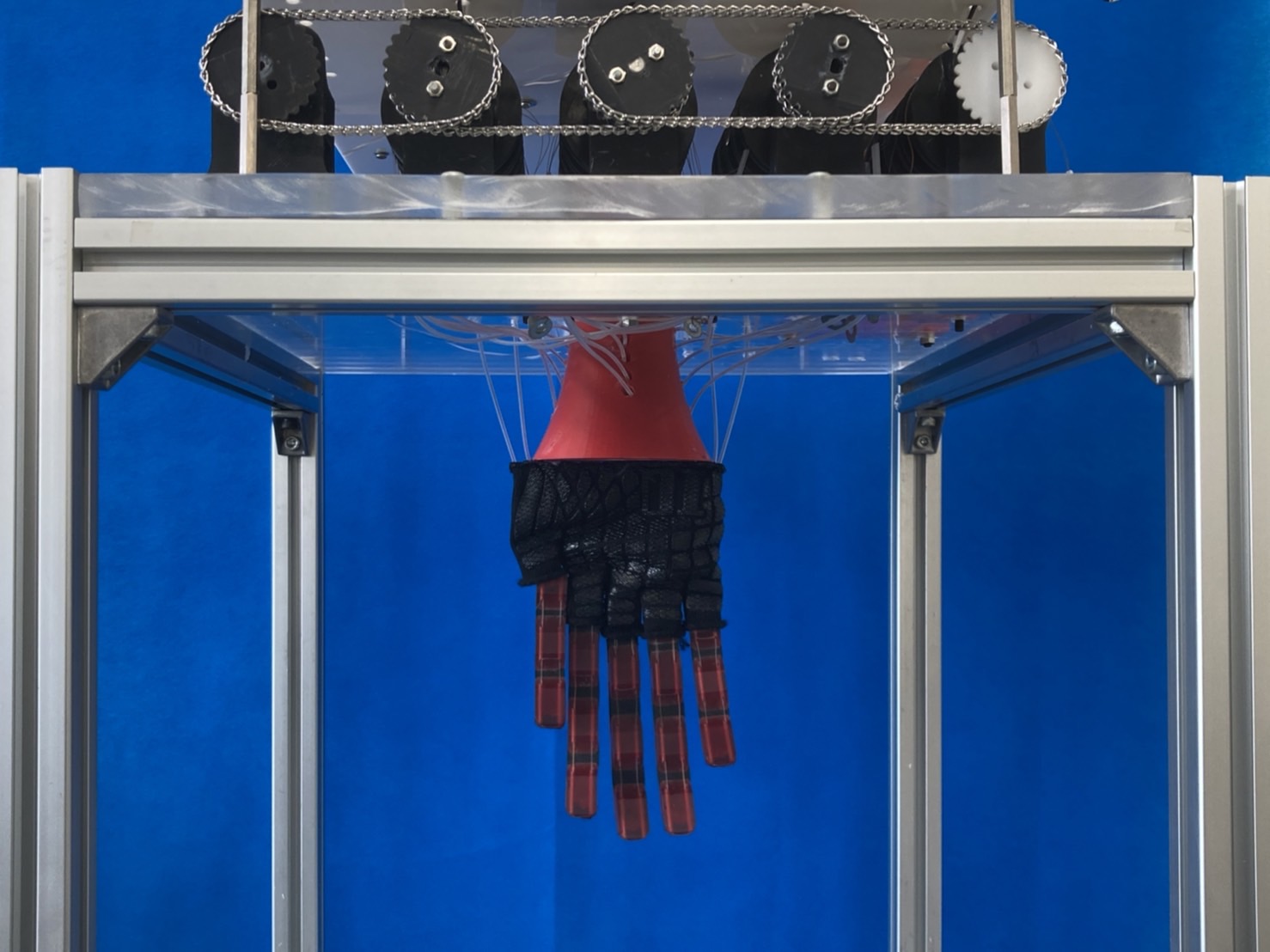
ロボットハンドの外観図である。駆動部はハンドの上部に設置し、単一のモータと25個の電池クラッチが連結されている。 この中からワイヤが連結された電磁クラッチを選択し、シナジーのように連動して目的の動作を行う。
異なる対象物の把持実験
様々な対象物の把持を行った。 電磁クラッチの性質を利用して、なじみ把持が可能になる。
グーチョキパのジェスチャ動作
グーチョキパのジェスチャ動作を行った。 電磁クラッチの入力のタイミングと間隔によってワイヤの巻取り動作が決定し、ジェスチャ動作完成する。
つまみ
把持ではなく、指先で対象物をつまむ動作ができるハンドを目指しています。 普段人間の動作でつまんでいるような物体をロボットハンドでも可能にしたいと考えました。 私たちの班では、5指ハンドと同じようにスポンジを用いて柔軟な指腹や関節構造を持つ腱駆動型ハンドを作成し、単一モータと電磁クラッチを使用してつまみ動作を試みました。
つまみハンドの概要図
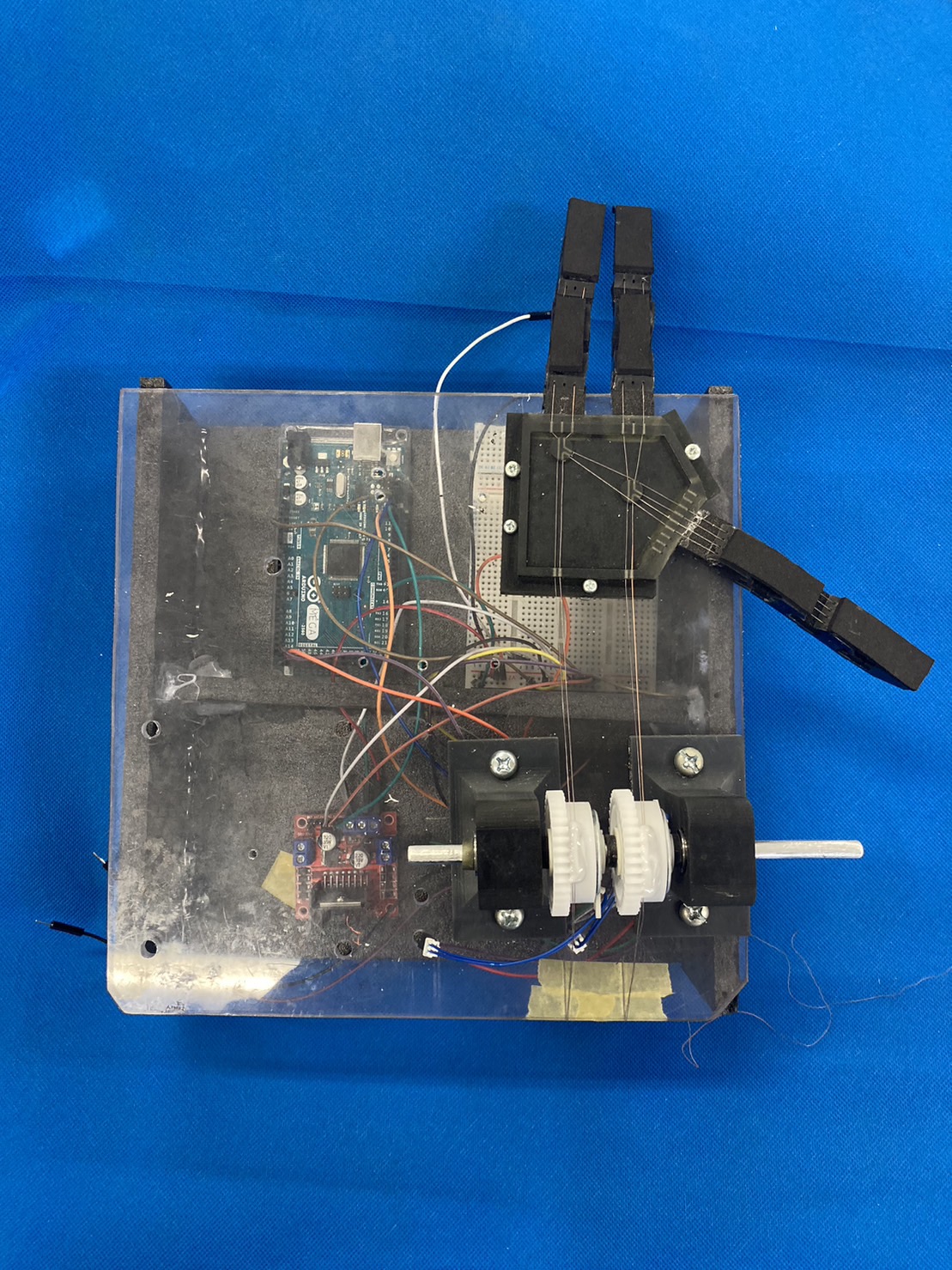
ロボットハンドの外観図である。ハンドは3本の指で、単一のモータと2個の電池クラッチが連結されている。 モータを回転させる際に電磁クラッチを作動させることで糸を巻き取り、つまみ動作を行う。
実際につまむ動作
親指と人差し指で実際にものをつまむ動作を行った。 つまんだ物体は薄いスポンジ板で、落とすことなくつまみが可能だった。
親指・人差し指・中指によるつまみ動作
親指と人差し指、親指と中指によるそれぞれのつまみ動作を行った。 親指と人差し指はつまみが可能で、親指と中指ではずれが生じた。
歩行ロボット
脚ロボットのバランス制御には、大きく2つのアプローチ方法があると思います。
- 床や壁から受ける力を使ってボディ運動を制御する方法
- ボディ運動を束縛して踏張りが足からはみ出さないようにする方法
私たちは,1.の方法のための制御アルゴリズムとメカニズムを研究しています。 この方法はまだ十分に研究されていませんが、リアルタイム制御のために必要と考えています。 重心と足の踏張り点の抽象モデルで原理を考えます。 多くの従来方法では足の踏張り点がはみ出ないように前後方向の加速度を制限する方法をとります。 私たちは、上方向の加速度を大きくして踏張り点を逃さない方法を試みています。
研究目的
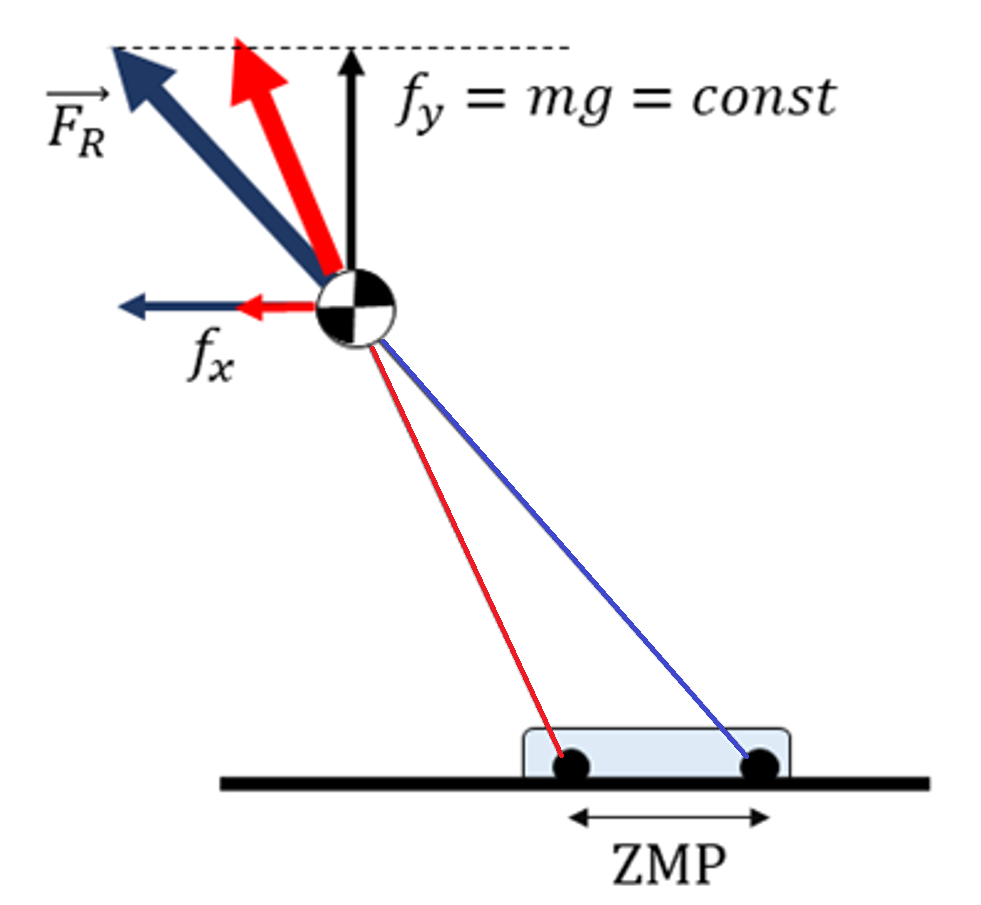
𝑓𝑥 を減速力として大きくするためには、ZMP は足裏の範囲内でより右側、つまりつま先側に置けば有利になります。 そのうえで水平方向への加速度を大きくするために、 𝑓𝑥 を 𝑓𝑦 に対して優先しています。 しかし重心高さ一定の下では、力の鉛直成分は𝑓𝑦 = 𝑚𝑔 に固定されるので、範囲の制限がある ZMP を操作するだけでは水平方向への加速度が制限され、歩行ロボットの運動が保守的なものになっています。 そこでロボットの重心の上下動を許容してZMP から重心方向への力を印加し、減速力𝑓𝑥を大きくする急制動方法を研究しています。
膝関節付き歩行ロボット
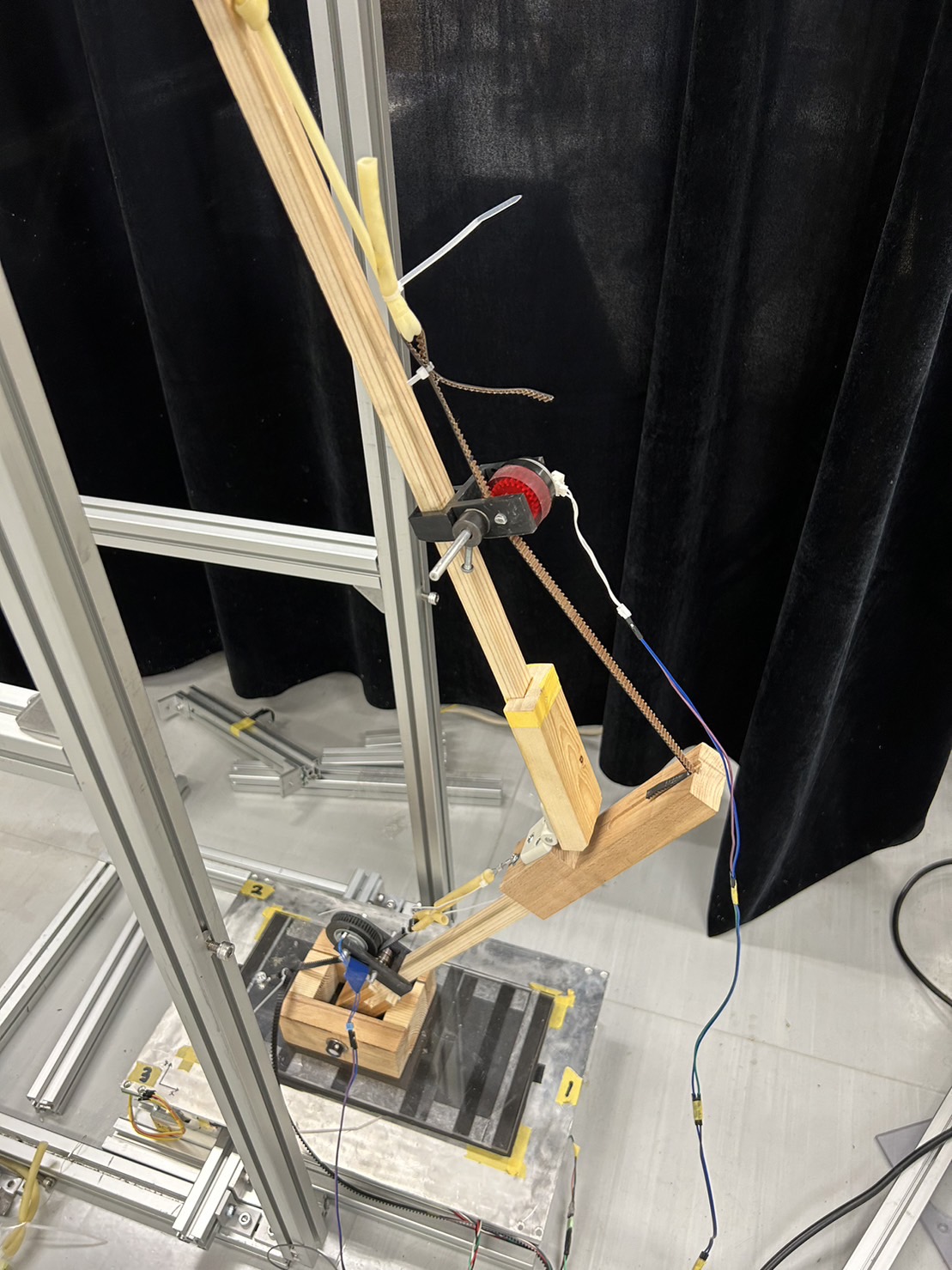
膝関節がある簡易的な歩行ロボットのモデルです。 二つの電磁ブレーキを利用して膝関節と足首を操作して、急制動実験を行っています。
膝関節付き歩行ロボット
実験装置
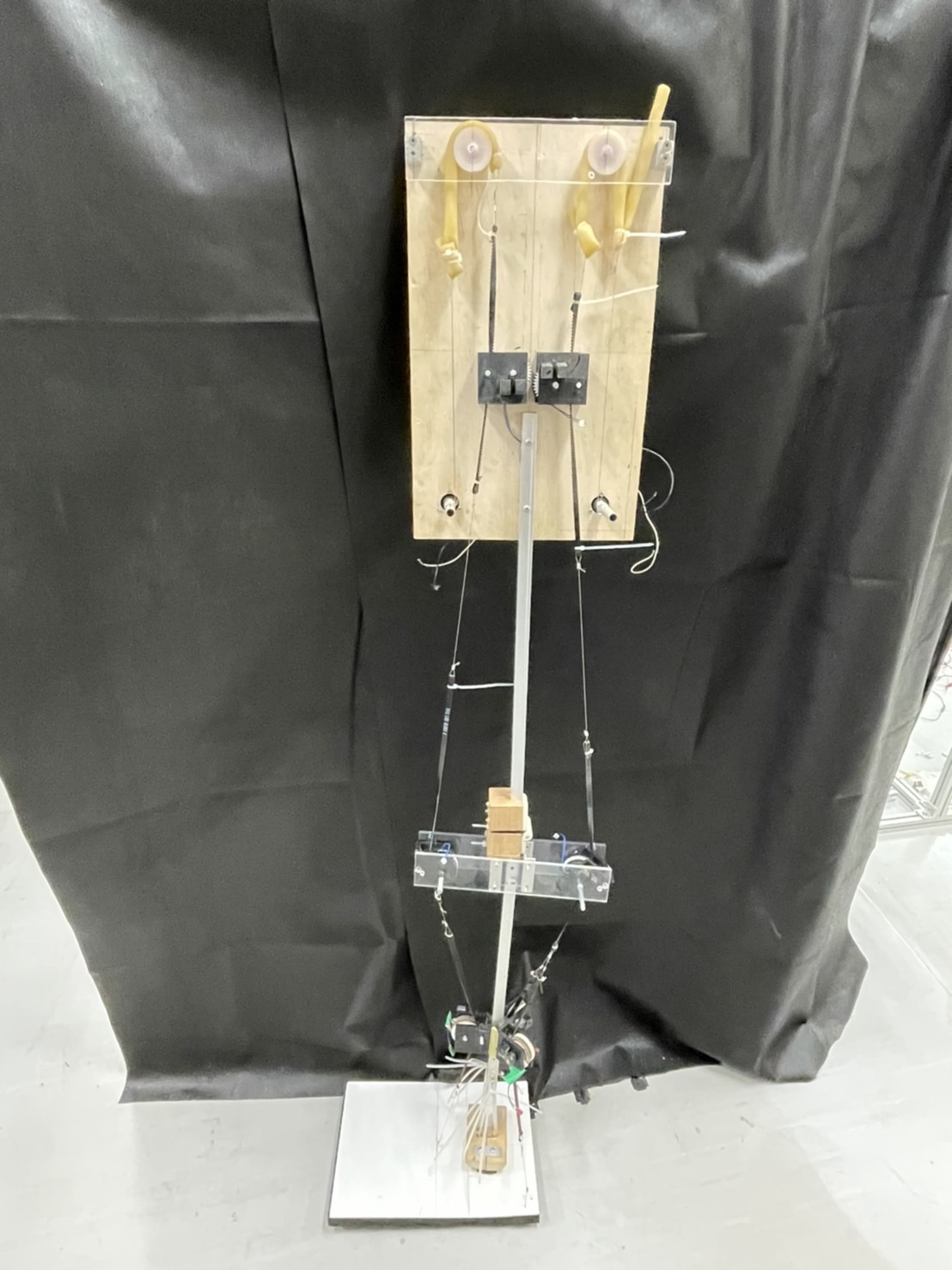
現在制作中の実験装置です. 上部にはワイヤーとゴム紐を引っ張りるための巻取り装置を取り付けていています。 また足首上、膝、巻取り装置の中央に電磁ブレーキを取り付けています。 今後この装置を使用し、急制動制御などの実験を行うことを考えています。